GUI 手册 · Chapter 22
Motor Param
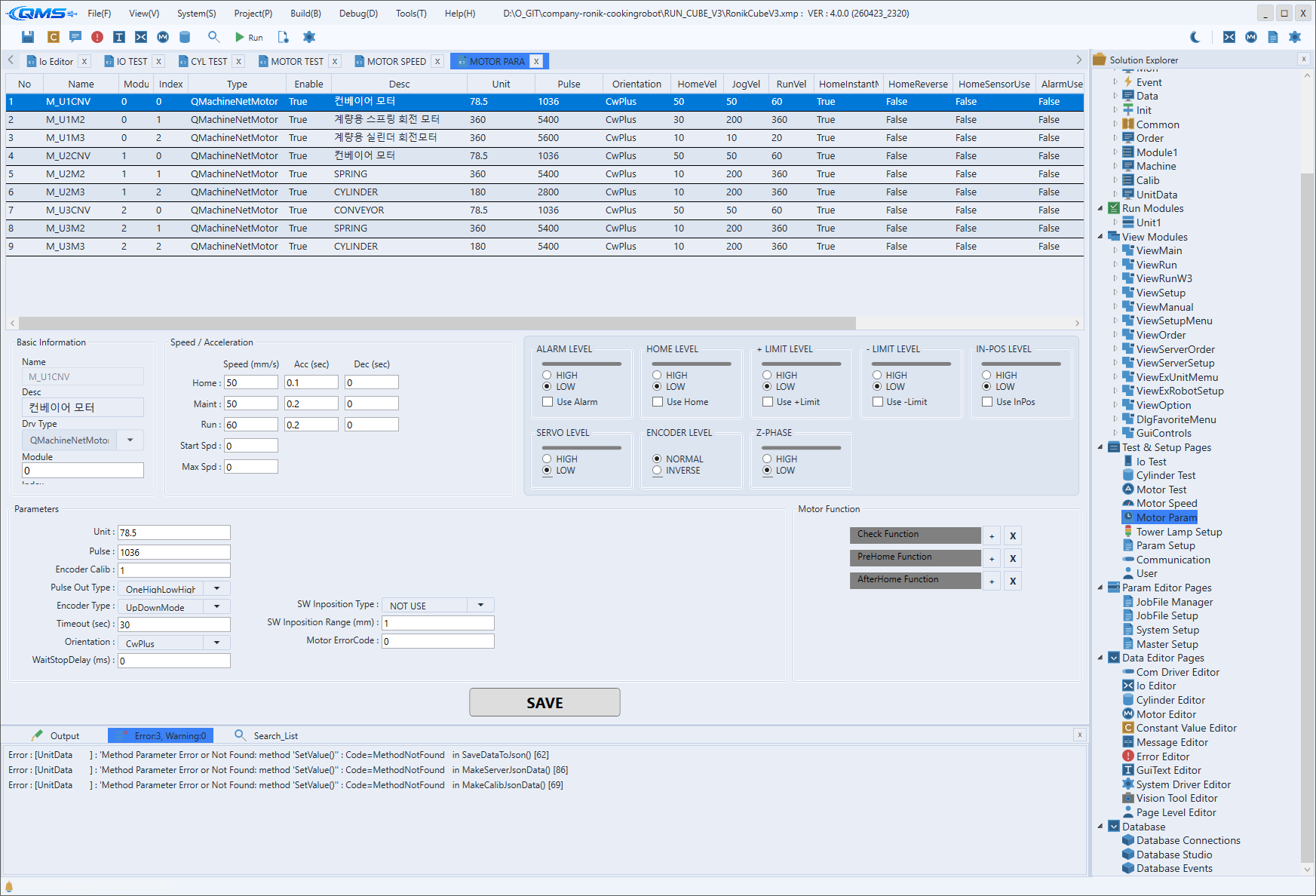
Motor Param 是按电机轴逐行整理动作参数、设置调优值的画面。画面顶部的 MOTOR LIST 表格以行列出各轴, 在此输入决定该轴实际如何运行的值:回零、点动、运行速度,传感器电平,编码器,脉冲输出方式等。进入路径为 System → Motor Param。
本画面与定义电机轴的 Motor Editor 共用同一编辑界面,区别在于进入视角。 System → Motor Param 面向运行现场,对已定义的轴调整参数调优值;Project → Motor Editor 面向项目 设计阶段,新定义轴本身。
主要区域
画面由顶部参数表格与底部按钮区组成。
| 区域 | 说明 |
|---|---|
| MOTOR LIST | 以行列出各轴的 DataGrid。最左侧 Name、Enable 两列被冻结,横向滚动时仍保留。 |
| 参数列 | 承载各轴动作值的多个列。数字单元格直接输入,部分列以复选框或下拉框选值。 |
| 缩放按钮 | 表格左下方的 +、-、* 按钮放大或缩小显示字号,或还原到原始比例。 |
| SAVE / RESTORE | 右下方按钮。SAVE 保存输入值,RESTORE 还原为上次保存值。 |
枚举下拉列
取值来自固定列表的列以下拉框显示。打开单元格即出现选项,无法输入非法值。
| 列 | 含义 |
|---|---|
EncoderInput | 选择编码器输入方式。 |
Orientation | 选择电机的安装/驱动方向(MotorOrientation)。 |
PulseOut | 选择脉冲输出方式。 |
传感器、信号电平列(PLimitSensorLevel、NLimitSensorLevel、HomeSensorLevel、AlarmLevel、
ServoOnLevel 等)同样以下拉框选择触点电平。
主要数字与勾选列
代表性参数列如下。各动作阶段的速度值也可在此输入,但带名称的速度集在 Motor Speed 中管理。
| 列 | 含义 |
|---|---|
HomeVel · HomeAccel · HomeDecel | 回零速度 / 加速 / 减速 |
JogVel · JogAccel · JogDecel | 点动速度 / 加速 / 减速 |
RunVel · RunAccel · RunDecel | 运行速度 / 加速 / 减速 |
Unit(UnitPerPulse) · Pulse | 每脉冲移动单位与脉冲数(机构换算) |
MinPos · MaxPos | 软件移动上下限 |
TimeOut · HomeTimeOut | 常规与回零超时 |
EncoderUse · InpositionUse · AlarmUse | 功能启用复选框 |
行编辑
在表格上右键打开上下文菜单以编辑行。Add Row 添加行,Duplicate Row 复制所选行,Move Up、
Move Down 调整顺序。Set All This Column 把所选单元格的值一次性应用到整列,Delete Row 删除行。
使用流程
- 经 System → Motor Param 打开画面。
- 在 MOTOR LIST 中找到要调优的轴所在行。
- 输入或选择所需单元格:速度、加减速、传感器电平、编码器、脉冲输出等。
- 若要把同一值应用到多个轴,选中单元格右键并使用
Set All This Column。 - 用底部
SAVE保存。输入有误时用RESTORE还原为上次值。